Прежде, чем я начну рассказывать дальше, я попрошу Вас вспомнить сцены из фильма «Живая сталь», где движениями робота-бойца управлял главный герой фильма, которого сыграл Хью Джэкман.
Оказывается, что подобная технология управления уже прямо сейчас существует в реальности, ее разработали Антон Богданович и его команда из университета Западного Сиднея. Исследователи взяли специализированный костюм, используемый для оцифровки движений человека, и приспособили его для управления движениями гуманоидного робота в режиме реального времени.
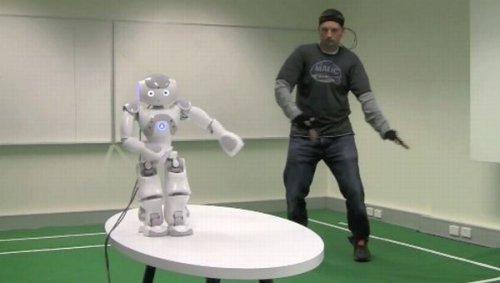
В системе была использована стандартная модель костюма захвата движений Xsens MVN, а в качестве робота был использован небезызвестный робот Nao компании Aldebaran Robotics. Используя промежуточный компьютерный интерфейс исследователи смогли костюм с роботом и добиться почти полной синхронности движений человека и робота.
Самая «соль» данной системы заключается в программном обеспечении компьютера. Вот что говорит по этому поводу Антон Богданович: «Гуманоидный робот и человек, несмотря на чисто внешнее сходство строения тела, имеют совершенно разные принципы организации движений, различный центр тяжести и т.п. Робот может совершить такие движения, которые человеку совершить не получится, к примеру, вращать свое туловище на 360 градусов. С другой стороны, человек тоже может двигаться так, что роботу будет не по силам повторить движения человека в точности».
Для решения вышеописанной проблемы исследователи создали множество специальных алгоритмов, которые «устраняют» различие между физиологией человека и строением робота, которые и являются ноу-хау исследовательской группы. Когда у Богдановича спросили, не собирается он сделать код этих алгоритмов открытым, он ответил: «Я бы не возражал, но я категорически против самой возможности использования результатов нашей работы в военных целях. Мы понимаем, что армия рано или поздно получит в свое распоряжение подобных роботов, но не хотим иметь к этому никакого отношения».
Сейчас исследователи прорабатывают вопрос лицензирования данной технологии и изучают возможности выпуска коммерческих продуктов на ее основе. С их точки зрения, такое дистанционное управление роботом может быть очень кстати при проведении сложных работ и операций в опасных для человека условиях и в непредвиденных ситуациях, когда нельзя применить заранее запрограммированных автоматических роботов. «Ведь дистанционное управление роботом с помощью джойстика, ручек и кнопок является немалой головной болью для операторов, мы собираемся устранить эту боль» – говорит Богданович.
[ Регистрация | Вход ]